We begin by describing the simplest version of our model. Later on, we will introduce several modifications, in order to deal with time dependent parameters.
Consider a hidden process (the non-observable actual number of counts in the phenomenon under study)  with Po-INAR(1) structure:
with Po-INAR(1) structure:
(1) 
where  is a fixed parameter,
is a fixed parameter,  Poisson(
Poisson( ), i.i.d., independent of are the innovations, and
), i.i.d., independent of are the innovations, and  is the binomial thinning operator:
is the binomial thinning operator:  with
with  i.i.d Bernoulli(
i.i.d Bernoulli( ) random variables. Later on, we shall introduce time dependence, and hence we will be considering that is a funtion of
) random variables. Later on, we shall introduce time dependence, and hence we will be considering that is a funtion of  .
.
The INAR(1) process is a homogeneous Markov chain with transition probabilities
![\[\mbox{\bf P}(X_n = i | X_{n-1} = j) = \sum_{k=0}^{i\wedge j} {j \choose k} \alpha^k (1-\alpha)^{j-k}\mbox{\bf P}(W_n=i-m)\]](https://underreported.cs.upc.edu/wp-content/ql-cache/quicklatex.com-b4c2c6ae57e5c5bf2b69a03a30a451d4_l3.png "Rendered by QuickLaTeX.com")
The expectation and variance of the binomial thinning operator are
![\[\textrm{{\bf E}}\left(\alpha \circ X_{n-1}|X_{n-1}=x_{n-1}\right)=\alpha x_{n-1}\]](https://underreported.cs.upc.edu/wp-content/ql-cache/quicklatex.com-7ce2fb345b26ff809880fa3d64f3db26_l3.png "Rendered by QuickLaTeX.com")
![\[\textrm{{\bf Var}}\left(\alpha \circ X_{n-1}|X_{n-1}=x_{n-1}\right)=\alpha (1-\alpha)x_{n-1}\]](https://underreported.cs.upc.edu/wp-content/ql-cache/quicklatex.com-ab266a70ae23f5819a9ec99a1cdfcacb_l3.png "Rendered by QuickLaTeX.com")
A simple under-reporting scheme
The under-reported phenomenon is modeled by assuming that the observed counts are
(2) 
where  and
and  represent the frequency and intensity of the under-reporting process, respectively. We will eventually be interested in considering that is time dependent:
represent the frequency and intensity of the under-reporting process, respectively. We will eventually be interested in considering that is time dependent:  . That is, for each , we observe with probability
. That is, for each , we observe with probability  , and a -thinning of with probability , independently of the past
, and a -thinning of with probability , independently of the past  .
.
Hence, what we observe (the reported counts) are
![\[Y_n = (1- \mbox{\bf 1}_n)X_n + \mbox{\bf 1}_n \sum_{j=1}^{X_n} \xi_j \quad\quad \mbox{\bf 1}_n\sim\mbox{Bern}(\omega), \quad \xi_j\sim\mbox{Bern}(q)\]](https://underreported.cs.upc.edu/wp-content/ql-cache/quicklatex.com-05afc409dfd81fa407438967367fb14e_l3.png "Rendered by QuickLaTeX.com")
Properties of the model
The mean and the variance of a stationary INAR(1) process with Poisson() innovations are  .
.
Its auto-covariance and auto-correlation functions are  and
and  respectively.
respectively.
Hence,
(3) 
The auto-covariance function of the observed process  is
is
![\[\gamma_Y(k)=(1-\omega(1-q))^2\alpha^{|k|}\mu_X\]](https://underreported.cs.upc.edu/wp-content/ql-cache/quicklatex.com-04ce5f4033db1a657027c6b566245dae_l3.png "Rendered by QuickLaTeX.com")
Hence, the auto-correlation function of is a multiple of  :
:
![\[\rho_Y(k)=\frac{(1-\alpha)(1-\omega(1-q))^2}{(1-\alpha)(1-\omega(1-q))+\lambda(\omega(1-\omega)(1-q)^2)}\alpha^{|k|}=c(\alpha,\lambda,\omega,q)\alpha^{|k|}.\]](https://underreported.cs.upc.edu/wp-content/ql-cache/quicklatex.com-e29d0096f34f8961001d4746695ae72d_l3.png "Rendered by QuickLaTeX.com")
Parameter estimation
The marginal probability distribution of is a \textbf{mixture of two Poisson distributions}
(4) 
When  the distribution of the observed process
the distribution of the observed process  is a zero-inflated Poisson distribution.
is a zero-inflated Poisson distribution.
From the mixture we derive initial estimations for , , and , to be used in a maximum likelihood estimation procedure.
The likelihood function of  is quite cumbersome to compute,
is quite cumbersome to compute,
![\[P(Y)=\sum_XP(X,Y)=\sum_xP(Y|X=x)P(X=x)\]](https://underreported.cs.upc.edu/wp-content/ql-cache/quicklatex.com-697188c0b1c2be88d4db1c9223e6e2f0_l3.png "Rendered by QuickLaTeX.com")
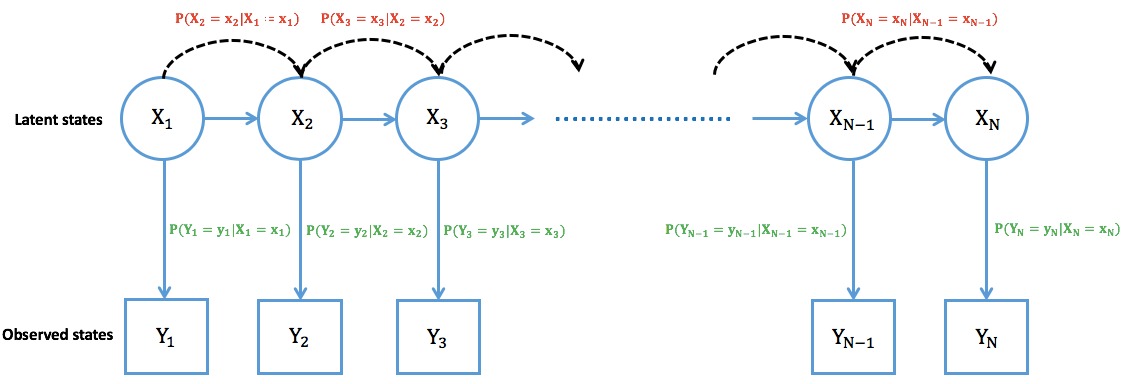
hence the forward algorithm (Lystig and Hughes (2002)), used in the context of HMC is a suitable option.
Consider the forward probabilities
(5) 
with  .
.
Then, the likelihood function is
![\[P(Y)=\sum_{n}\alpha_n(X_n).\]](https://underreported.cs.upc.edu/wp-content/ql-cache/quicklatex.com-3c698d50637b3db2dcb65ee5275e79e7_l3.png "Rendered by QuickLaTeX.com")
 and
and  are the so-called emission and transition probabilities.
are the so-called emission and transition probabilities.
Transition probabilities are computed as
(6) 
While emission probabilities are given by
(7) 
From this computations, a nonlinear optimization program computes the MLE estimates of the parameters.
Reconstructing the hidden chain
In order to reconstruct the hidden series , the Viterbi algorithm (Viterbi, 1967) is used.
The idea is to provide the latent chain  that maximizes the likelyhood of the latent process given the observed series, assuming all the parameters are known.
that maximizes the likelyhood of the latent process given the observed series, assuming all the parameters are known.
Let  be the likelihood function of the model, then
be the likelihood function of the model, then
![\[P(X_{1:n}|Y_{1:n})=\frac{P(X_{1:n},Y_{1:n})}{P(Y_{1:n})}\]](https://underreported.cs.upc.edu/wp-content/ql-cache/quicklatex.com-6323e8ba0948fbd8f390821ea8791647_l3.png "Rendered by QuickLaTeX.com")
Since  does not depend on , it is enough to maximise the probability
does not depend on , it is enough to maximise the probability  .
.
The hidden series is reconstructed as:
![\[X^*=\arg\max_{X} P(X_{1:n},Y_{1:n}).\]](https://underreported.cs.upc.edu/wp-content/ql-cache/quicklatex.com-2629f307edab447ae3a1454286ab3744_l3.png "Rendered by QuickLaTeX.com")
Predictions
Having observed  , we are interested in predicting
, we are interested in predicting  , for
, for  , and in evaluating the uncertainty of these predictions.
, and in evaluating the uncertainty of these predictions.
From equation 3, we have that  , so that, if we have a good estimate for
, so that, if we have a good estimate for  , then we can predict by means of its expectation
, then we can predict by means of its expectation  .
.
From (1), assuming that the expectation of the innovations depends on , that is, the noise is Poisson( ) it is straightforward to see that
) it is straightforward to see that
(8) 
The easiest way to estimate  is by substituting
is by substituting  by in (3), to get
by in (3), to get , and then in 8 to get
, and then in 8 to get
(9) 
Bibliography
T.C. Lystig, J.P. Hughes (2002), Exact computation of the observed information matrix for hidden Markov models, Jr of Comp.and Graph. Stat.
Viterbi, A.J. (1967), Error bounds for convolutional codes and an asymptotically optimum decoding algorithm. IEEE Transactions on Information Theory, 13, 260-269